Autonomous Driving
Sesor Placement
- Placement Method of Multiple Lidars for Autonomous Vehicles
- Placement Method of Multiple Lidars for Roadside Infrastructure
Placement Optimization of Multiple Lidar Sensors for Autonomous Vehicles
- 유전 알고리즘을 사용한 자율주행을 위한 다중 센서 배치 제안
- 라이다 센서의 감지 범위를 효과적으로 표현할 수 있는 Lidar Occupancy Board를 제안
- 센서 사각지대 감소 및 데이터 해상도 향상
-
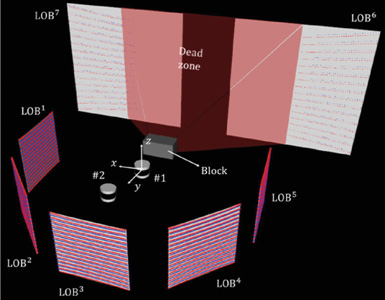
Lidar occupancy boards (LOBs)
-

Lidars placed on test vehicle
-
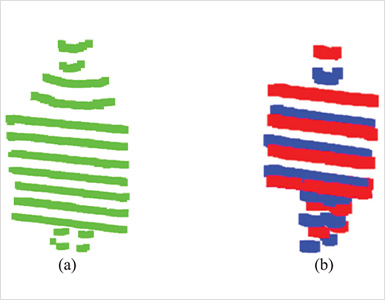
Point data from lidars on test vehicle
(a) One 32-channel lidar. (b) Two 16-channel lidars.
Placement Method of Multiple Lidars for Roadside Infrastructure in Urban Environments
- 자율주행 차량의 센서는 물리적인 한계가 있어 인프라에 센서를 설치하고 정보를 차량과 공유하여 효율성을 높일 수 있음
- 인프라의 다수 센서의 커버리지를 최대화하면서 사각지대를 최소화 필요
- Voxel Grid를 도입하여 최적화 문제를 정의하고, 유전 알고리즘으로 문제를 해결
-
Lidar occupancy boards (LOBs)
-
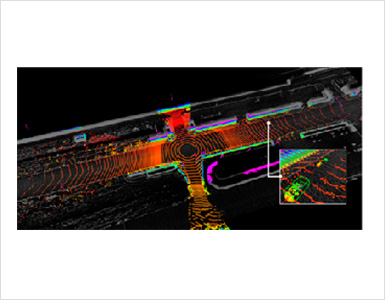
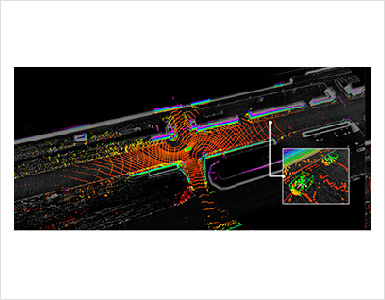
One 128 channel LiDAR
-
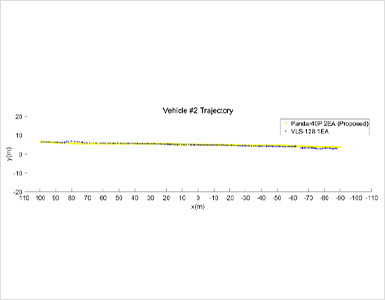
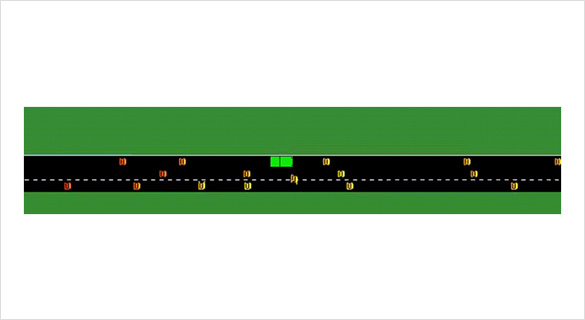
Trajectory of Detected Vehicle
Decision
- Local Motion Planning in Racing
- Reinforcement Learning Method for Self-driving Decision-making
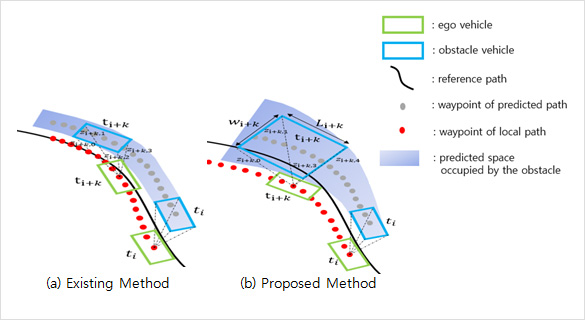
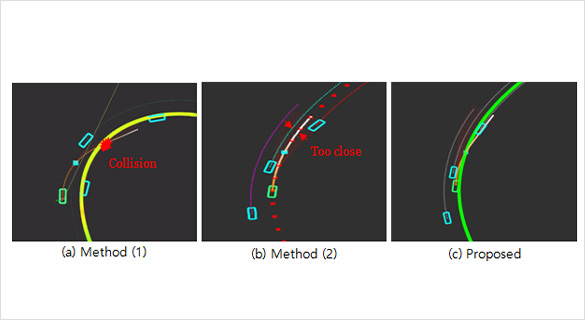
Frenet Frame based Local Motion Planning in Racing Environment
- When the opponent vehicle deviates from the predicted path, the risk of accidents increases, and this phenomenon is pronounced in situations with high curvature.
- By designing an Extended Occupancy Space, it is possible to select the optimal path considering the uncertainty of the opposing vehicle's predicted trajectory.
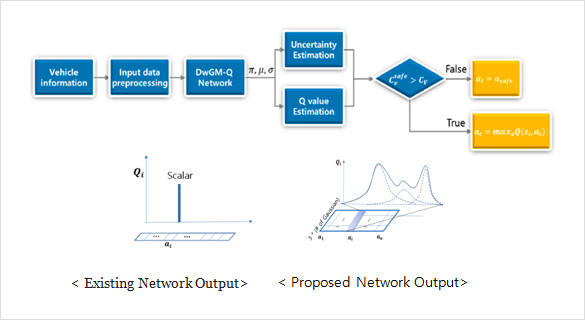
Efficient Reinforcement Learning Method for Self-driving Decision-making in consideration of Unexpected Environment
This reinforcement learning is an overtaking decision algorithm aimed at reaching the destination quickly. While traditional reinforcement learning methods do not provide a measure of confidence in their decisions, the proposed DwGM-Q algorithm secures confidence in its decisions by enabling the network to quantify uncertainty.
Sensor fusion
- Camera-LiDAR Fusion
- Reinforcement Learning Method for Self-driving Decision-making
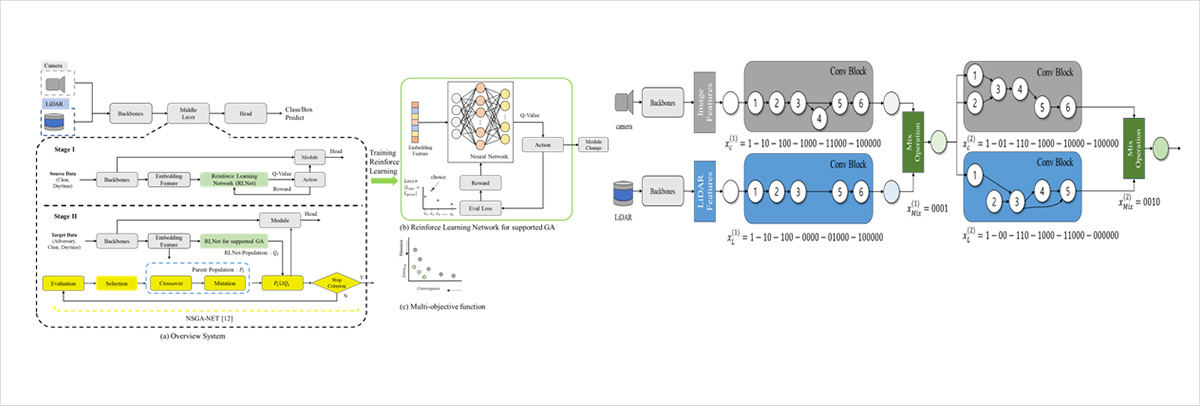
RLGA-NET: Reinforce Learning Support Genetic Algorithm Network for Camera-LiDAR Fusion of Adversary Weather
- 유전자 알고리즘(Genetic Algorithm)기반에 Neural Architecture Search(NAS)연구를 위한 강화학습을 이용한 최적화 방법
- 강화학습으로 합리적인 네트워크 모듈 제안을 반영하여 유전자 생성 과정 최적화 및 기존 방법대비 Network Search 시간 감소
Adaptive Feature Attention Module for Robust Visual-LiDAR Fusion based Object Detection in Adverse Weather Conditions
- 악천후 대응을 위한 센서 융합 (라이다 + 카메라) 기반의 객체 인식 (object recognition) 기술 개발
- 기존 방법 대비 성능 향상 및 반복 된 결과의 편차를 줄인 강인한 학습 결과 제공
-
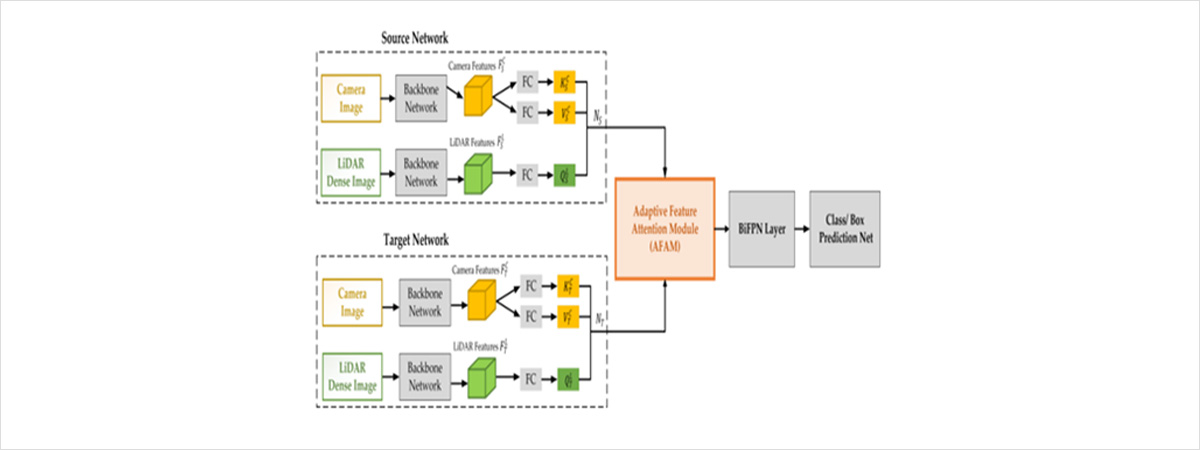
악천후 대응 카메라-라이다 융합 네트워크 구성도
-

악천후 대응 카메라-라이다 융합 네트워크 구성도
-
Performance comparison of proposed method with SOTA algorithms
Comparison Network Modality Top5-mAP Top1-mAP Worst-mAP Variance a EfficientDet C 0.347±0.00073 0.367 0.318 0.049 AFAM-
EfficientDetC 0.354±0.00024 0.37 0.325 0.045 b EfficientDet C,L 0.398±0.00018 0.414 0.377 0.037 AFAM-
EfficientDetC,L 0.403±0.00007 0.419 0.402 0.017 c ResT-
EfficientDetC,L 0.234±0.00232 0.247 0.205 0.042 AFAM+
ResT-
EfficientDetC,L 0.308±0.00077 0.319 0.294 0.025 d FSL C,L 0.406±0.00016 0.427 0.395 0.032 AFAM C,L 0.403±0.00007 0.419 0.402 0.017
충청북도 청주시 서원구 충대로1 충북대학교 E10 (전자정보2관)
교수님 연구실 : 313호 / 로보틱스 연구실 : 316, 317호
전화번호 : 043-271-3240
이메일 : taehpark@cbnu.ac.kr
COPYRIGHT 2024ⓒ충북대학교 로보틱스연구실. ALL RIGHTS RESERVED. Designed by WebSite.co.kr